
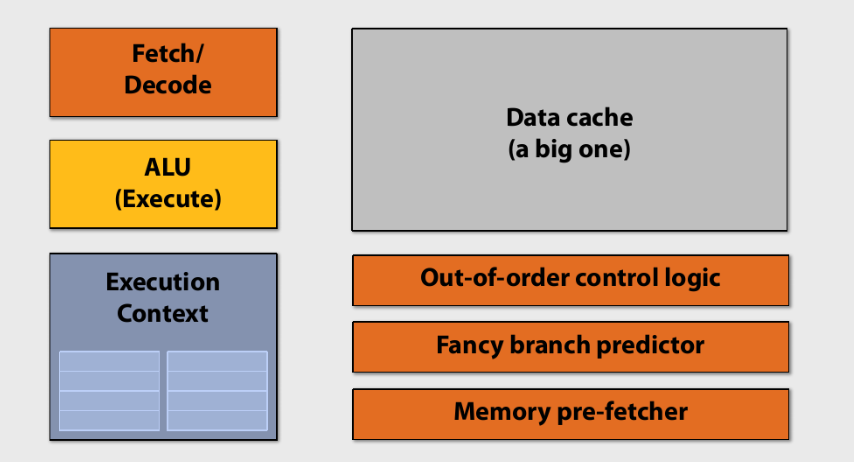
CPU 架构
cpu中较多的晶体管用于数据缓存和流程控制, 只拥有几个少数的高速计算核心.
- Fetch/Decode: 取指令、译码单元
- ALU(Arithmetic Logic Unit): 算术逻辑单元
- Execution Context: 执行上下文池
- Data cache: 数据缓存
- 流水线优化单元: 如乱序执行、分支断定预测、memory预存取等。
单核(少核)处理器发展的物理约束
\[P = C * V ^{2} * f\]P 为功耗, V是电压,C是和制程有关的一个常数项,f是时钟频率。
- 制程极限:量子隧穿。
- 时钟频率墙:处理器的时钟频率无法保持线性的增长。
- 存储墙:虽然提高晶体管集成度可以增加处理数据的速度,但是从存储单元读取数据的速度却也是瓶颈。
解决方案之一: 多核心,并行计算。
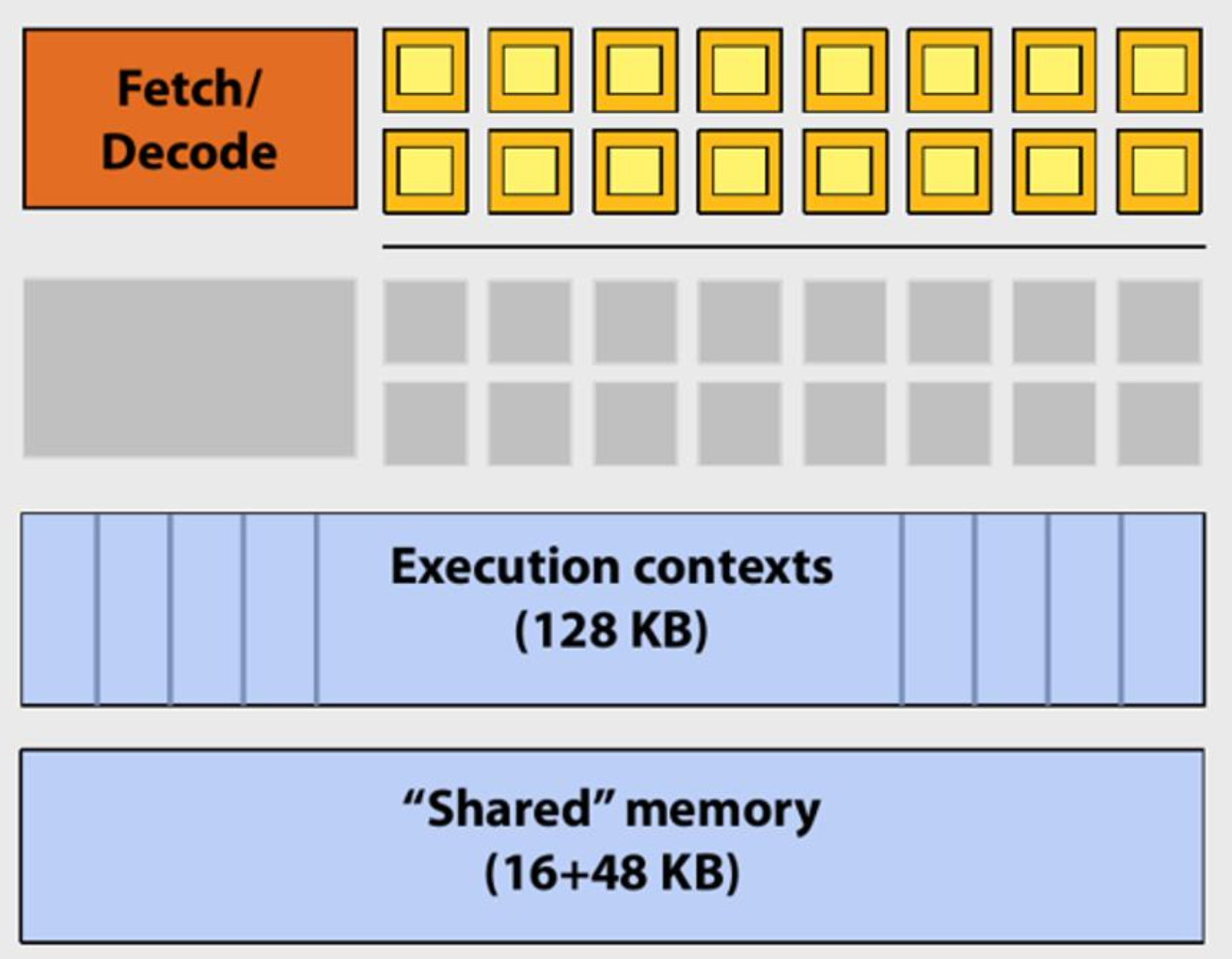
GPU 架构
- 拥有更高的算力
- 拥有更大的数据传输带宽
-
图中的深浅黄色叠加的小方块,表示的是一个SIMD function unit。(Single Instruction Multiple Data,单指令多数据流,能够复制多个操作数,并把它们打包在大型寄存器的一组指令集。 )。Control shared across 16 units(1 MUL-ADD per clock)
-
Groups of 32[CUDA Threads/fragments/vertices] shared in an instruction stream.
-
Up to 48 groups are simultaneously interleaved。
-
Up to 1536 individual contexts can be stored。
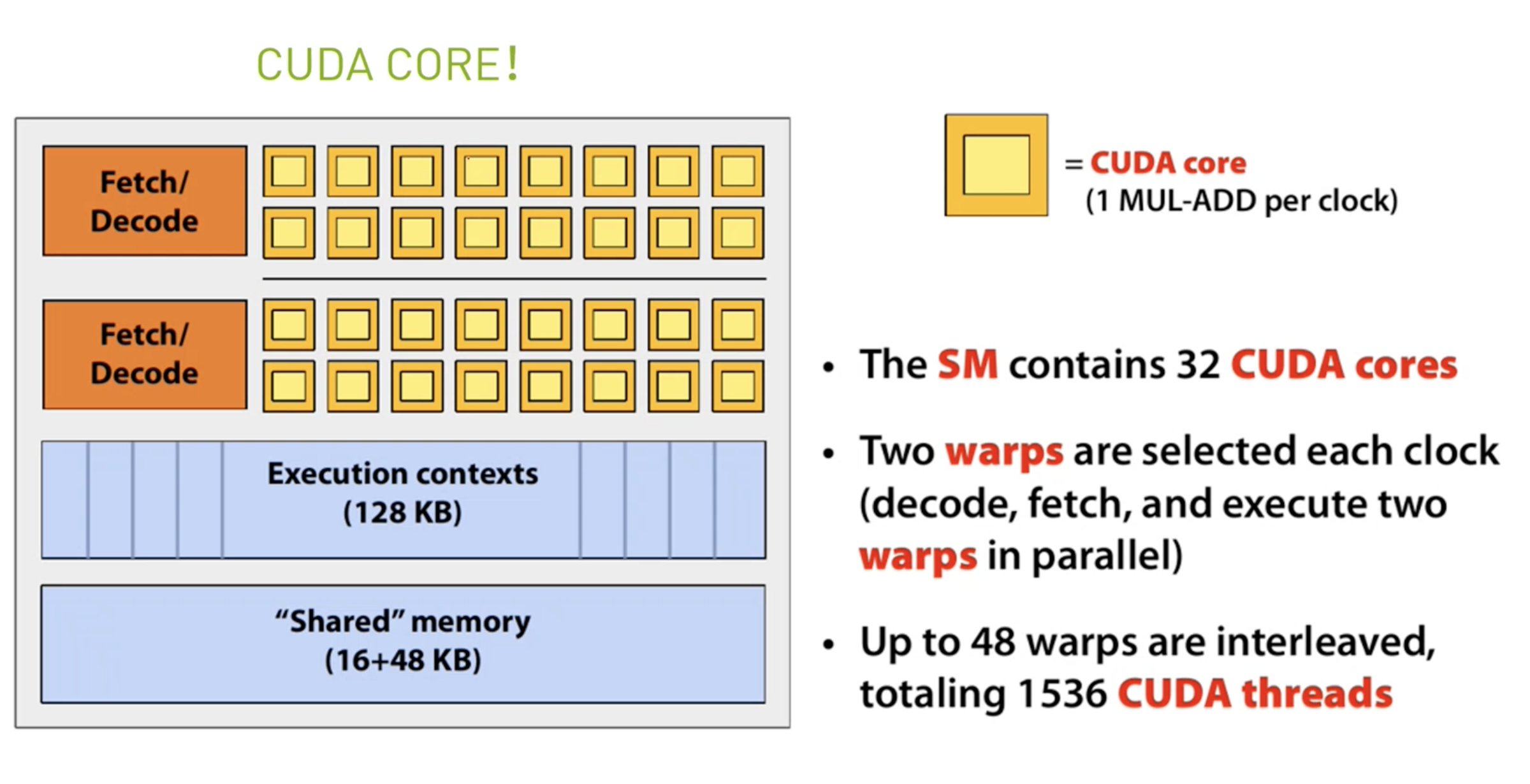
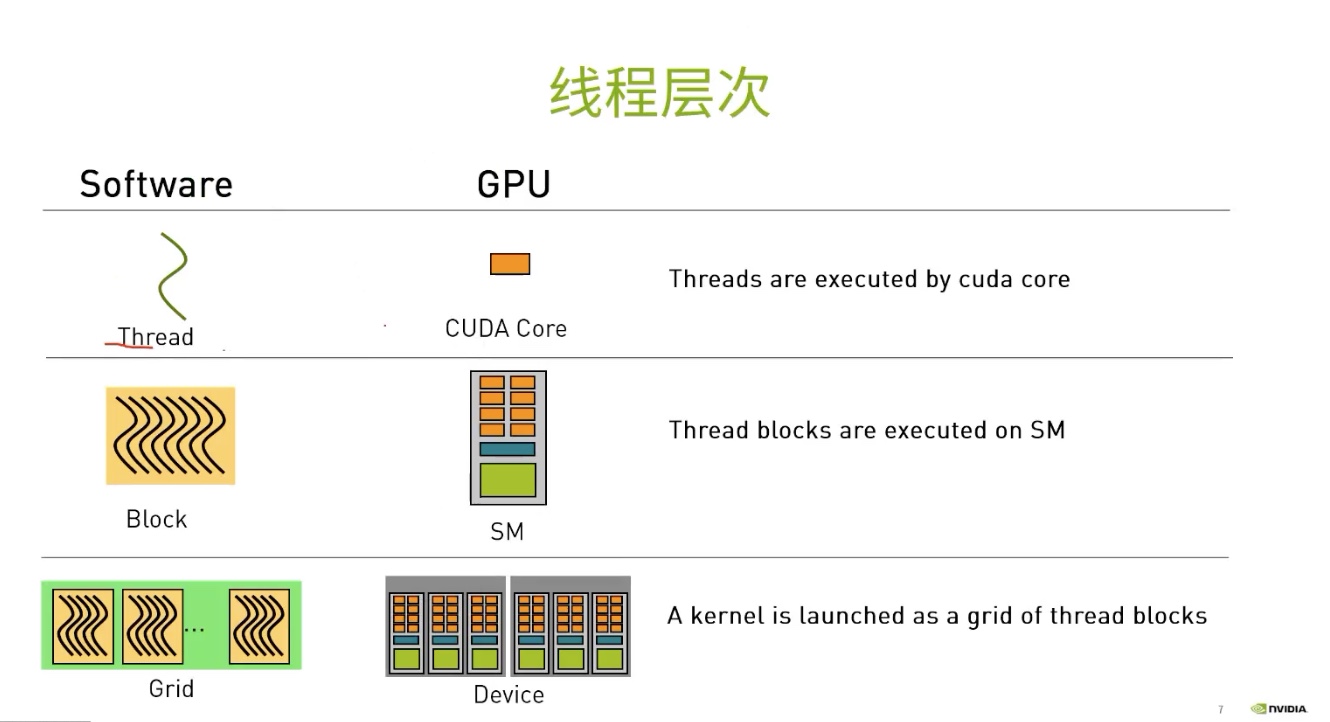
流多处理器(Streaming Multiprocessors)
SM: Stream Multi-Processor。SM的核心组件包括:
- 多个cuda core,
- 共享的内存,
- 一些寄存器等。
SM可以并发执行数百个线程,并发能力取决于SM中包含的cuda core(也就是streaming processor)的数量。 Fermi架构GF100是32个,GF10x是48个。Kepler架构都是192个,Maxwell都是128个。 kernel启动后,threads会被分配到多个SM中执行,但是同一个block中的threads必然在同一个SM中并行(逻辑层面)执行。
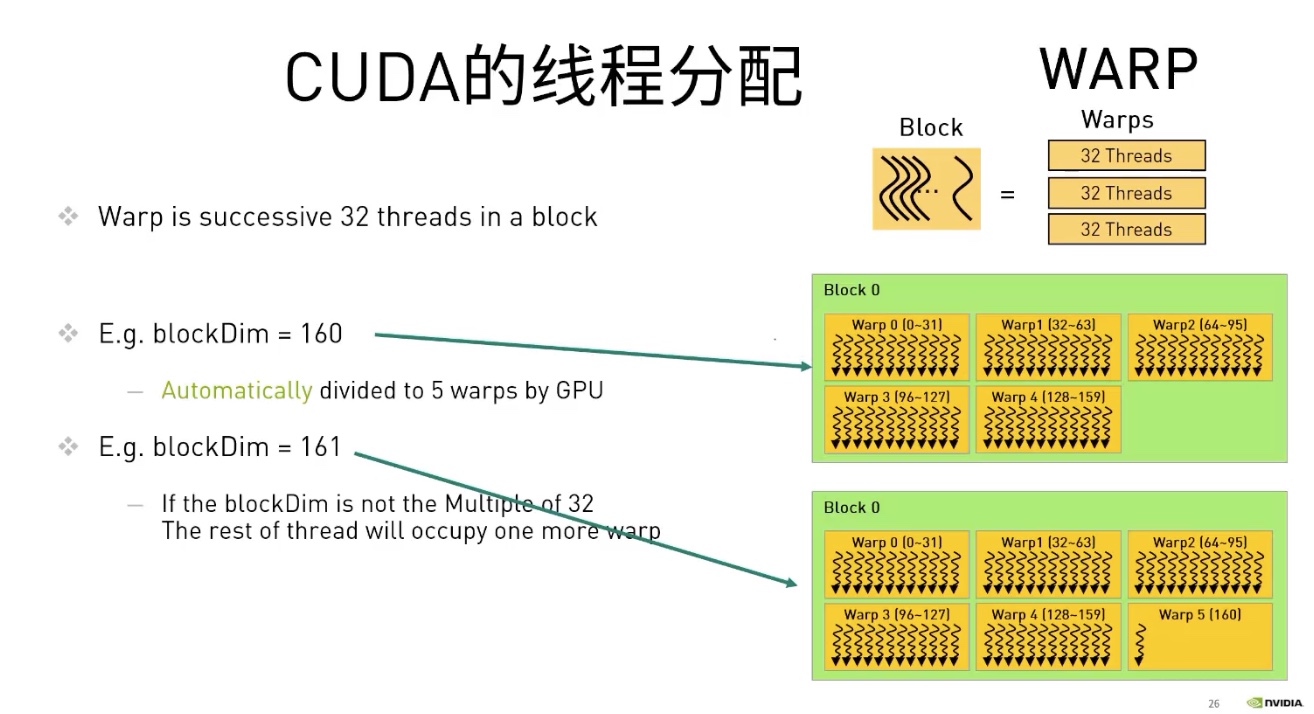
Warp: 32 CUDA Cores。 一个Warp代表了在物理层面,一起同时执行同一个指令的核心们。(虽然逻辑层面我们认为所有thread是并行执行的,但是其实只有一个Warp中的threads在物理层面算是同时执行) 一个warp包含32个并行thread,这32个thread执行于SMIT模式。也就是说所有thread执行同一条指令, 并且每个thread会使用各自的data执行该指令。
warp是调度和运行的基本单元。一个warp需要占用一个SM运行,多个warps需要轮流进入一个SM, 由SM硬件层面的warp scheduler负责调度。
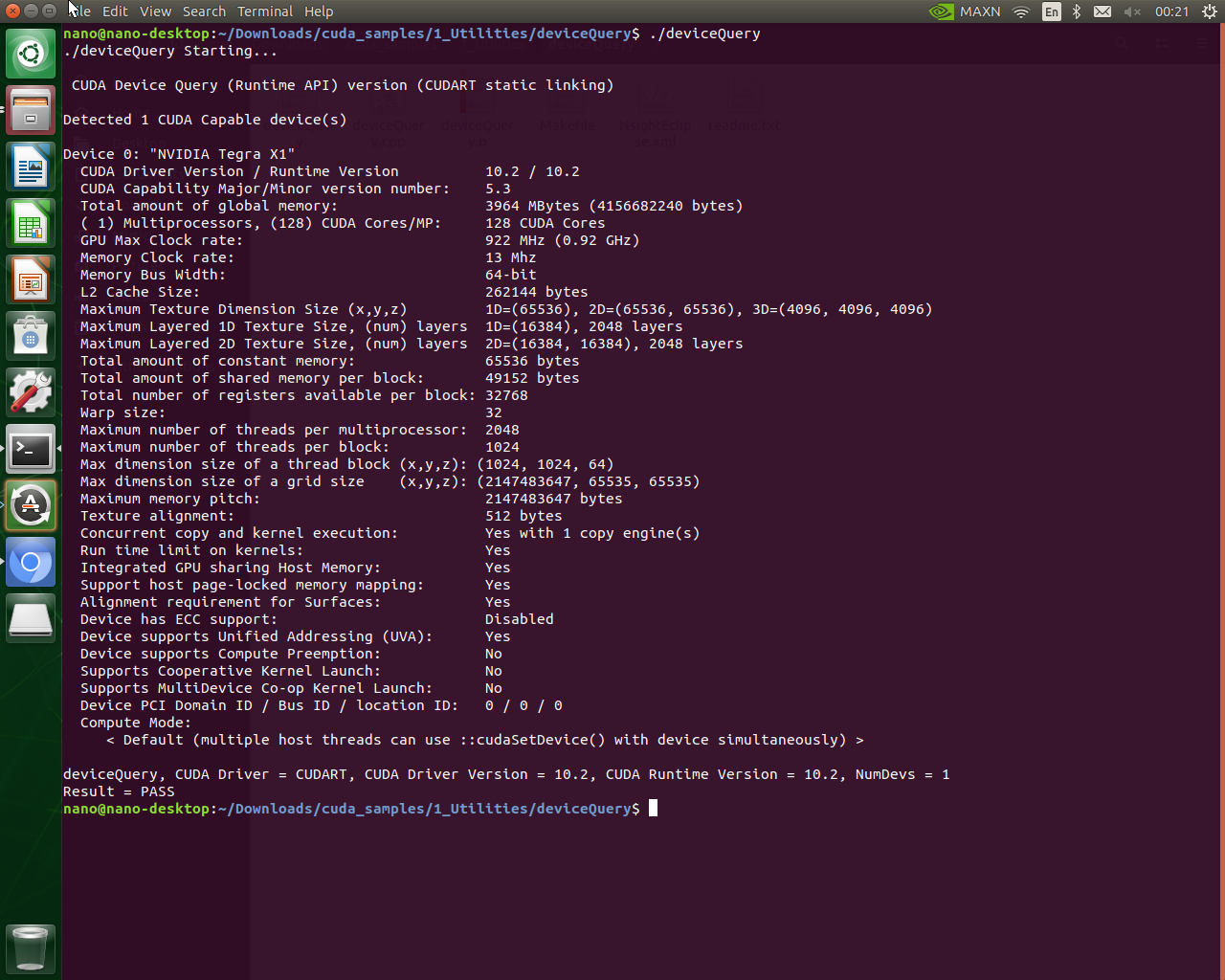
查看GPU的SM数量以及warpSize的办法为,获取cudaDeviceProp类型的变量:
int deviceId;
cudaGetDevice(&deviceId);
cudaDeviceProp props;
cudaGetDeviceProperties(&props, deviceId);
int computeCapabilityMajor = props.major;
int computeCapabilityMinor = props.minor;
int multiProcessorCount = props.multiProcessorCount;
int warpSize = props.warpSize;
冷知识:市面上买来的显卡,体积和质量大部分是在风扇和对应的电机,处理器芯片本身的质量是较小的。
并行计算简介
- 使用多个计算资源,解决一个计算问题。
- 通信和计算的开销比例要合适。
- 不要受制于访存带宽。
Amdahl’s Law
程序的可能的加速比,取决于可以被并行化的部分:
Speed Up Rate = 1 / (1 - P) 其中, P代表了可以被并行化的部分所占的用时的比例。
如果用N个处理器并行处理:
Speed Up Rate = 1 / (S + (P / N)) 其中,N代表了处理器数量,P是可以并行的部分,S表示串行的部分。
并行化的可扩展行有极限:
| N | P=0.5 | P=0.9 | P=0.99 |
|---|---|---|---|
| 10 | 1.82 | 5.26 | 9.17 |
| 100 | 1.98 | 9.17 | 50.25 |
| 1000 | 1.99 | 9.91 | 90.99 |
| 10000 | 1.99 | 9.91 | 99.02 |
初识CUDA
异构计算:简单来说就是将不同的内容分配到不同的设备上进行计算。
- 逻辑控制:CPU。将CPU和内存称作Host。
- 密集计算:GPU。将GPU和显存称作Device。
CUDA安装后如何查看设备中的GPU状态:
- 个人电脑,工作站: nvidia-smi
- Jetson:jtop
CUDA安装后,有很多的sample示例在起安装的文件夹下,可以自行编译,运行,学习。
下图是一个在jetson nano上运行cuda示例程序的一个截图,该程序是用来查看设备各项特性的。
下图是一个在作者装有2060显卡上运行同样的示例程序的截图:
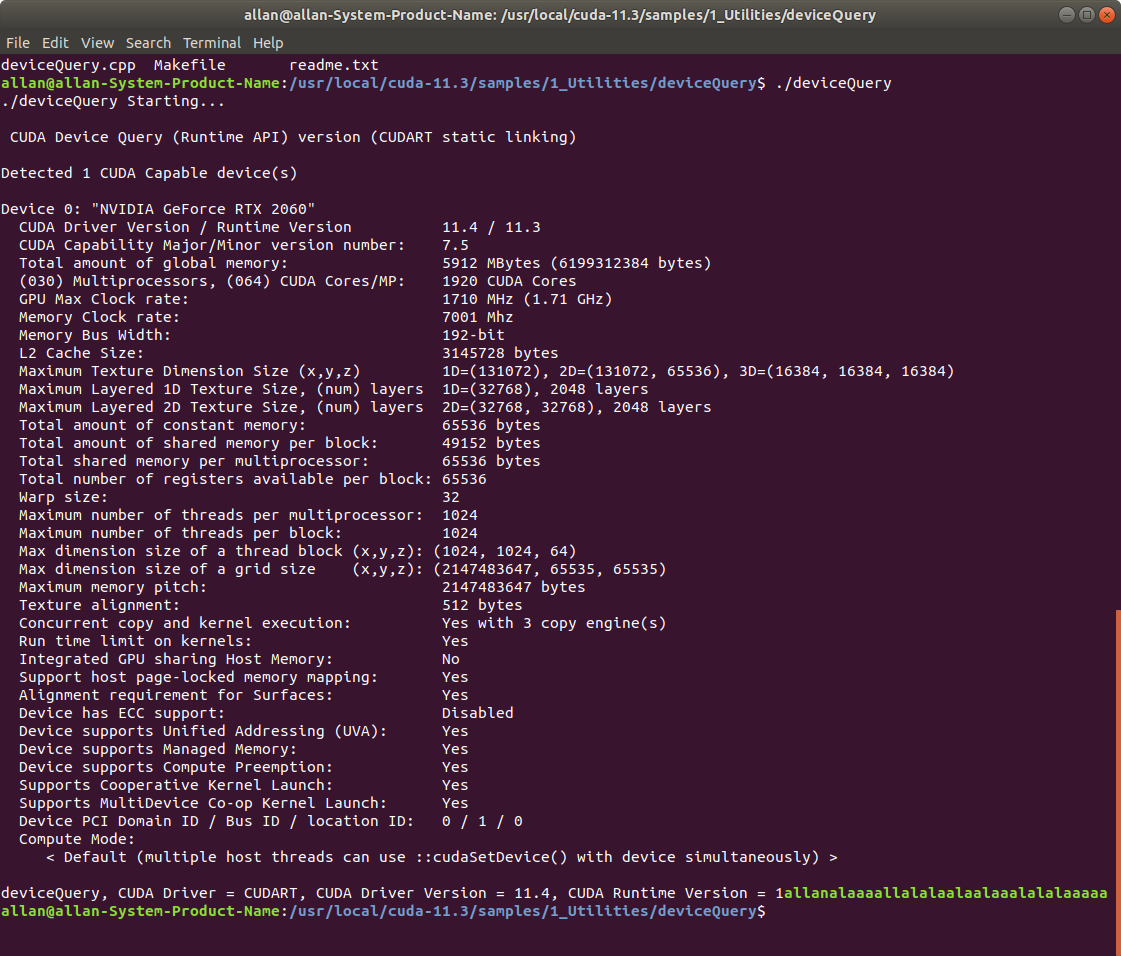
对比之下,是能看出两种设备的资源差异的。
CUDA编程
编程模式:Extended C
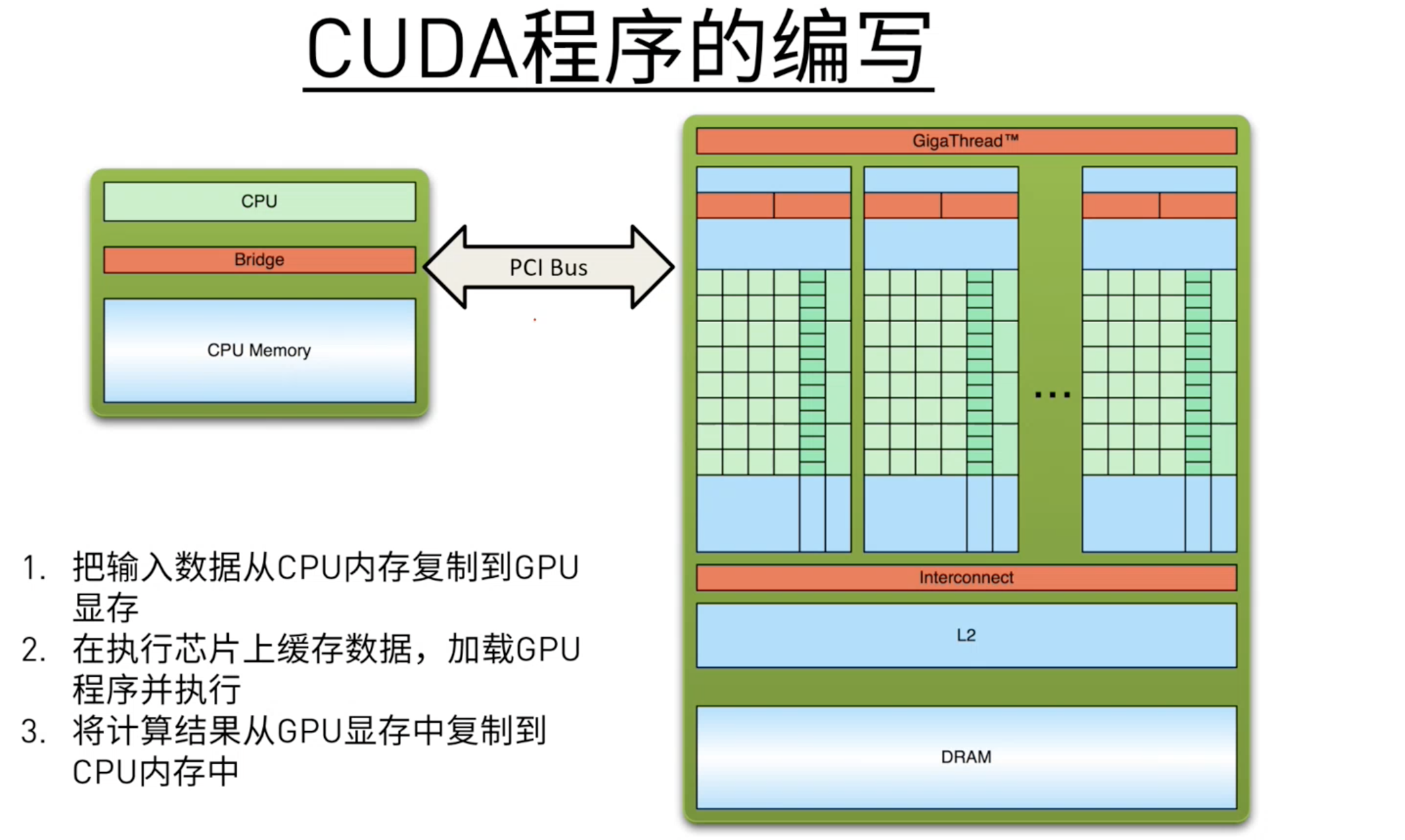
- 数据从内存复制到显存。
- 数据从显存缓存到处理器上,加载GPU程序,执行程序,将结果保存在显存。
- 将计算结果从显存复制到内存。
何为CUDA的kernel? 以下是摘自CUDA programming guide的一个简介:
“CUDA C++ extends C++ by allowing the programmer to define C++ functions, called kernels, that, when called, are executed N times in parallel by N different CUDA threads, as opposed to only once like regular C++ functions.
A kernel is defined using the __global__ declaration specifier and the number of CUDA threads that
execute that kernel for a given kernel call is specified using a new <<<...>>>execution configuration syntax
(see C++ Language Extensions).
Each thread that executes the kernel is given a unique thread ID that
is accessible within the kernel through built-in variables “threadIdx”.”
Declspecs
__device__: 执行空间说明符,功能为:
- 明确函数需在设备上执行
- 只能从设备调用
- __global__和__device__执行空间说明符不可以一起使用
__global__: 执行空间说明符,将函数声明为核函数。功能为:
- 明确函数需在设备上执行
- 可从主机调用
- 它修饰的函数必须具有void返回值
- 对__global__函数的任何调用,都必须指定其执行配置
- 对__global__函数的调用时异步的,这意味着它在设备完成执行前会返回
__host__: 执行空间说明符,功能为:
- 明确函数需在主机上执行
- 只能从主机上调用
- __global__ 和 __host__ 不能一起使用。但是 __device__ 和 __host__ 可以一起使用,在这种情况下,该函数是为主机和设备编译的。
- 问题: 既然是在主机上执行和调用,和普通的函数有什么区别。这是因为,有些函数,可能既想运行在device端,也想运行在host端,那么如果没有__host__
说明符,就需要定义两个相同的函数,为在device端运行的加上__device__修饰符,这样做起来有些冗余。因此,就有了__host__就可以让它和__device__说明
符一起使用,修饰同一个函数,那么编译的时候就会分别为host端和device端都编译一份。
__shared__
__local__
__constant__
...
关键字
threadIdx
blockIdx
Intrisics
__syncthreads
运行期API
Memory: cudaMalloc
symbol
撰写Makefile需要注意的点
如果有文件名和make的指令重名,只需要再撰写makefile的时候(例如课上演示的存在一个名为clean的文件),
需为重名的指令加上.PHONY: xxx 例如(.PHONY: clean)即可。
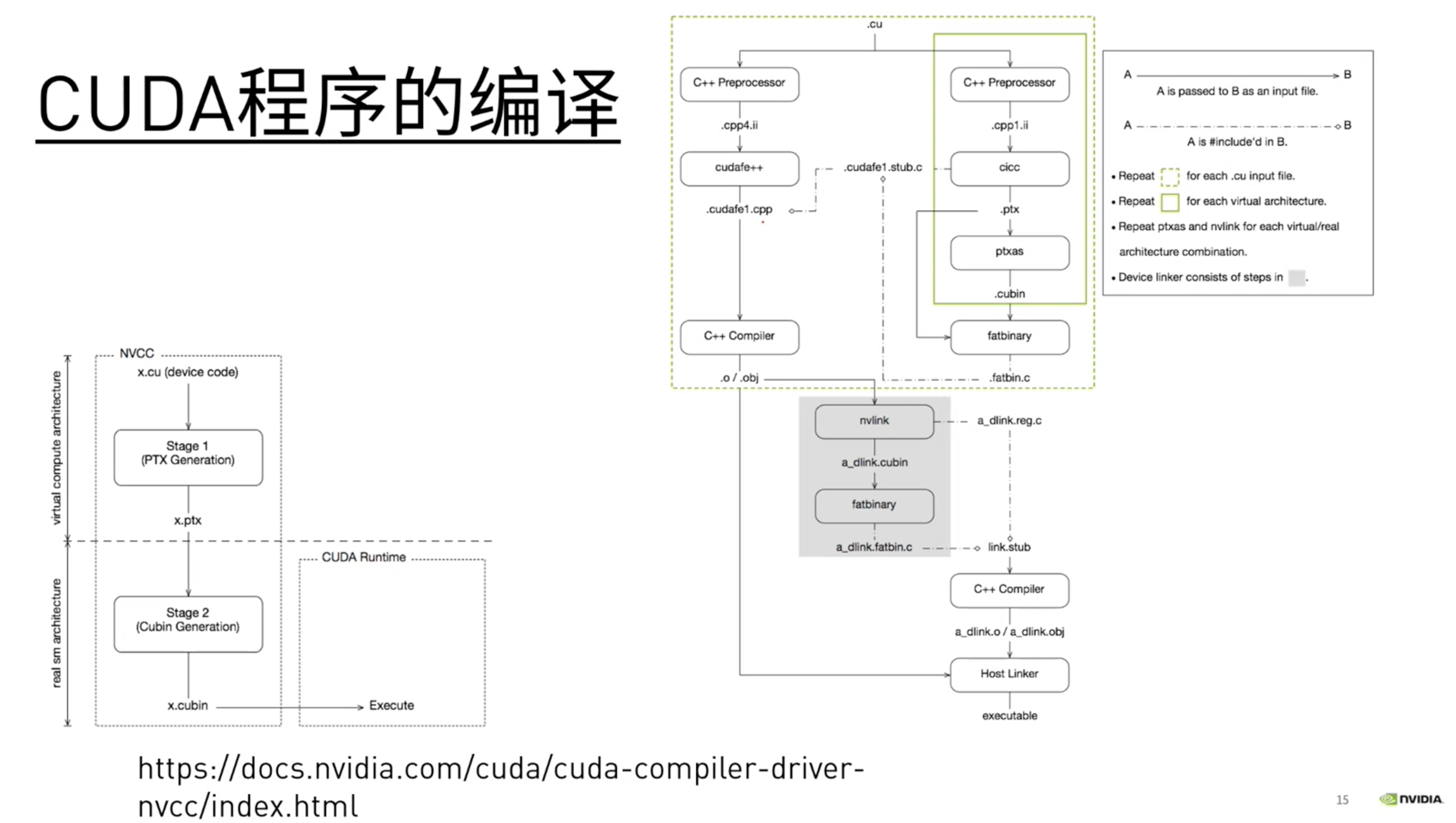
CUDA程序的编译
不同型号的GPU对应了不同类型的架构,因此也对应了不同的编译参数: 关键点:–gpu-architecture参数需要 小于 –gpu-code
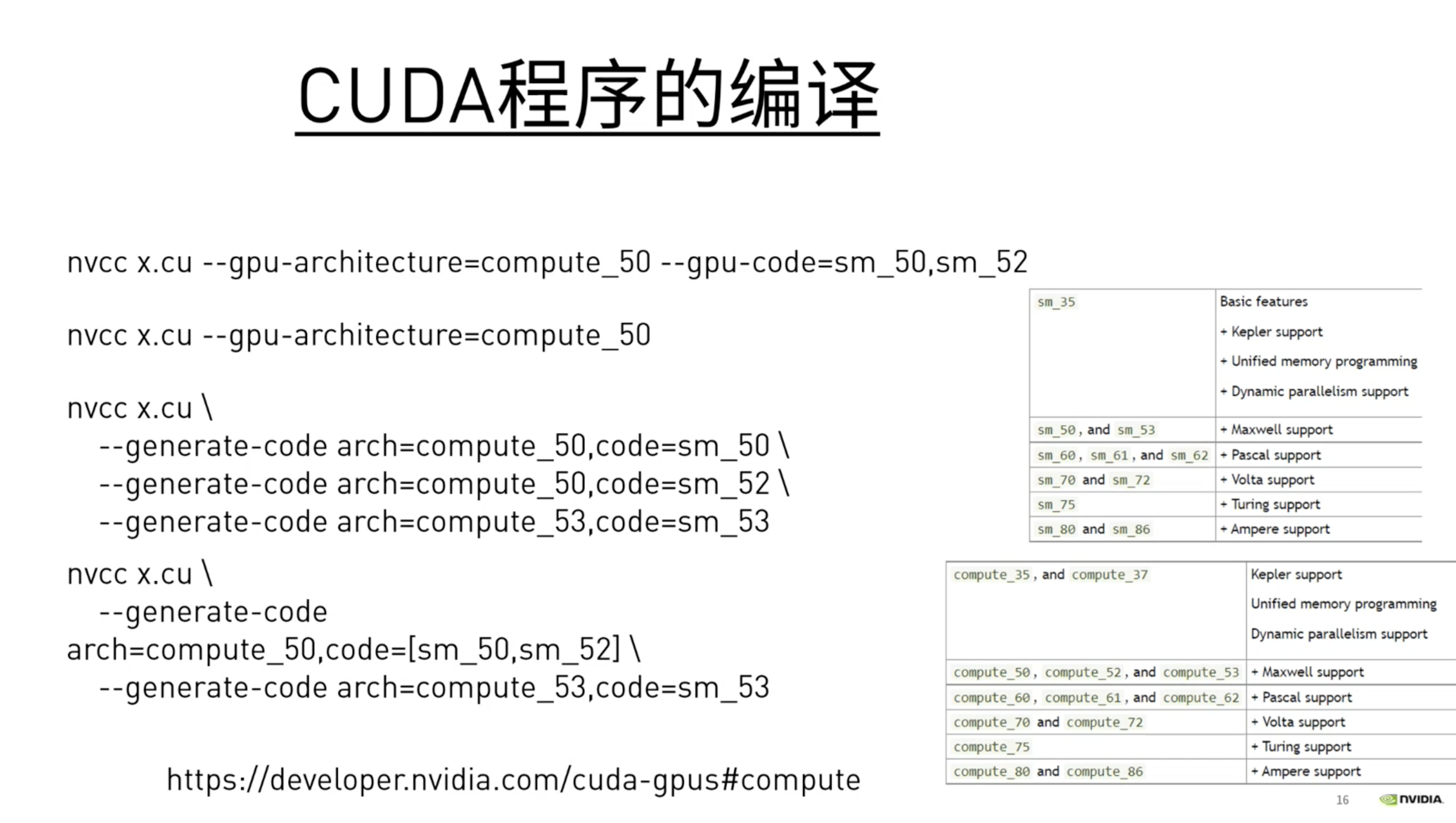
关于如何确定自己机器上GPU的architecture, 建议直接搜显卡的型号查看。也有人建议可以使用 cuda device prop查询,但是作者目前为止还没有完全搞明白具体的做法。
nvcc的一些参数,可以通过nvcc --help 来查看:
例如,课程示例中涉及到的--device-c
--device-c (-dc)
Compile each .c/.cc/.cpp/.cxx/.cu input file into an object file that contains
relocatable device code. It is equivalent to '--relocatable-device-code=true
--compile'
疑惑点: 课程中提及的 真实架构 和 虚拟架构 的概念:
按照 助教 的解释是, CUDA的GPU代码编译分为两个部分,第一步生成虚拟机指令(中间代码),
第二步再从虚拟机指令生成实际GPU上可以运行的二进制代码。--arch=compute_53指定了虚拟机,--code=sm_53指定了实际的机器(Jetson Nano)。
为什么要分为两步:
- 中间代码可以兼容多种实际机器的代码。
- 中间代码是伪汇编代码,PTX可以用来确定代码中可以使用的cuda功能,PTX到cubin的编译用来指定真实的架构。
- 中间表示与硬件无关,可以进行编译优化,增加一套新的硬件,便只需要增加后端。(类似llvm的前后端分离的思想)
- 上图中的cicc就是一个llvm的优化器,生成PTX。
NVPROF
nvprof 是NVIDIA提供的用于生成GPU timeline的工具,它是cuda toolkit自带的。
Kernel timeline输出的是以GPU kernel为单位的一段时间的运行时间线。我们可以通过其观察GPU在什么时候闲置或者利用不充分,更准确的定位优化的问题。
使用时:
nvprof ./executable
关于nvprof的参数,同样也可以通过 nvprof --help进行查看
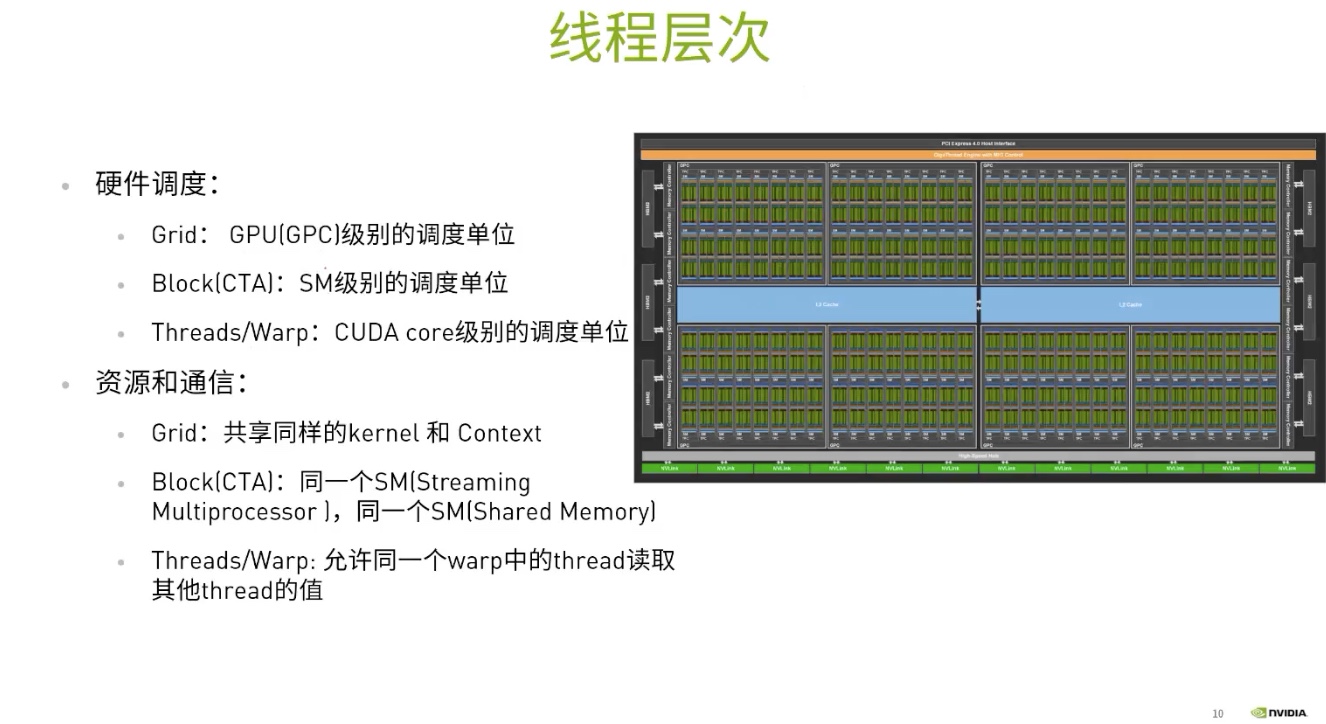
线程层次
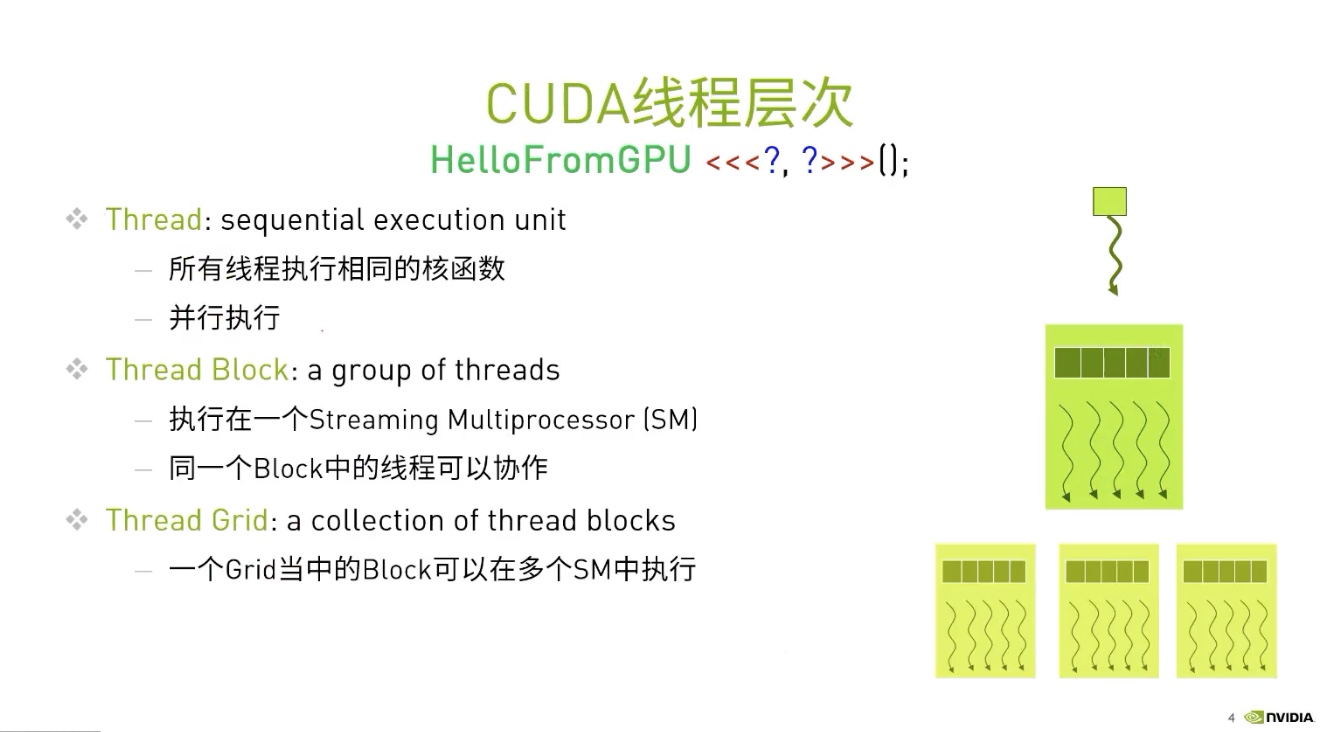
每个线程在其线程块内部均会被分配一个索引,从 0 开始。此外,每个线程块也会被分配一个索引,并从 0 开始。正如线程组成线程块,线程块又会组成网格,而网格是 CUDA 线程层次结构中级别最高的实体。简言之,CUDA 核函数在由一个或多个线程块组成的网格中执行,且每个线程块中均包含相同数量的一个或多个线程。
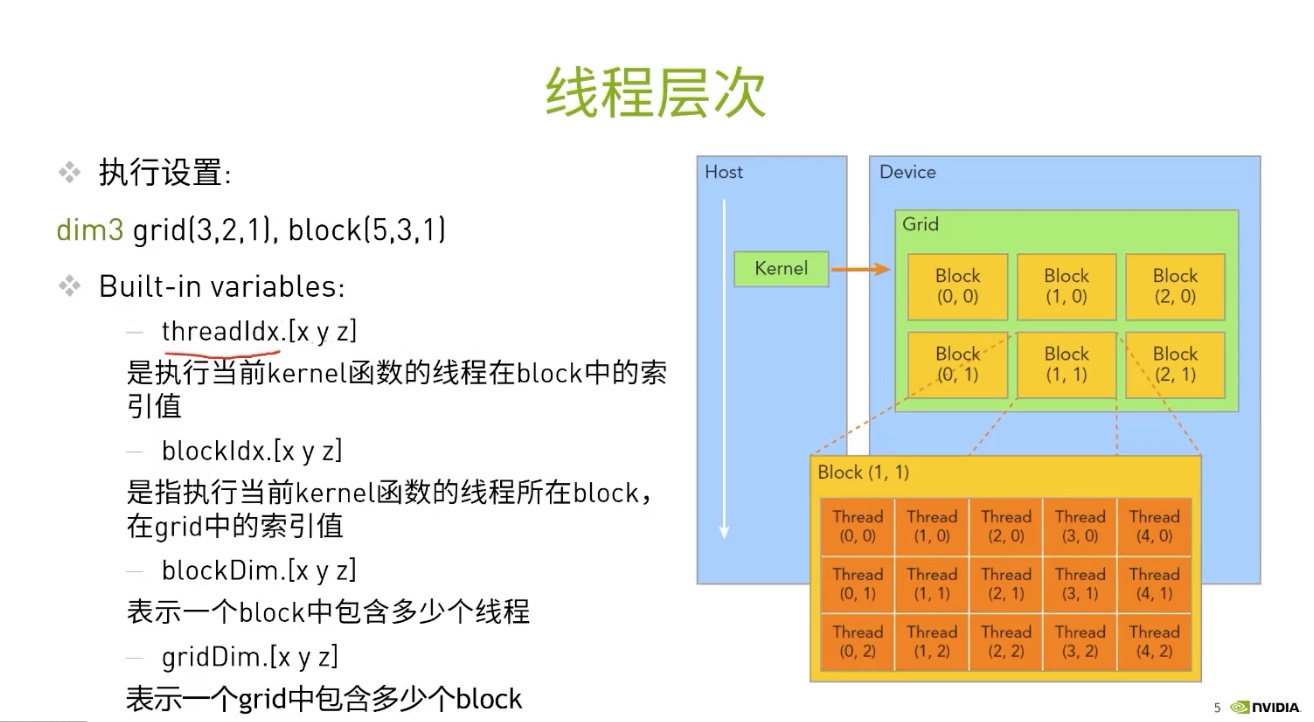
CUDA 核函数可以访问能够识别如下两种索引的特殊变量:正在执行核函数的线程(位于线程块内)索引和线程所在的线程块(位于网格内)索引。这两种变量分别为 threadIdx.x 和 blockIdx.x。
核函数调用时的会需要指定每个grid中block的数量,以及每个block中thread的数量:
HelloFromGPU<<<num_blocks_in_one_grid, num_threads_in_one_block>>>
核函数调用的配置参数和grid的数量无关?
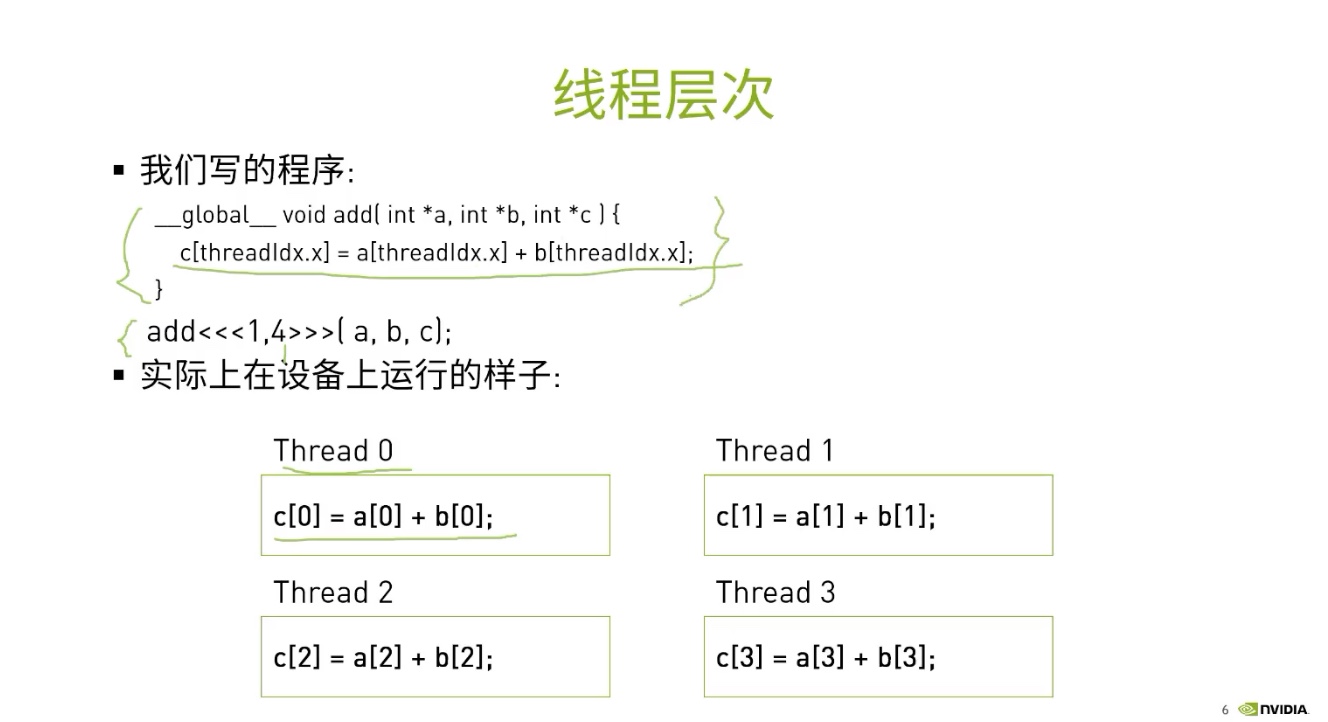
执行时,所有申请的线程,都会执行相同的核函数。
一个硬件层面的cuda core不仅仅只执行一个thread。当一个thread执行完,如果有其他的thread在等待,那么会执行新的thread。
例如一个jetson Nano只有128个核心,但是可执行的线程数量远大于128个。
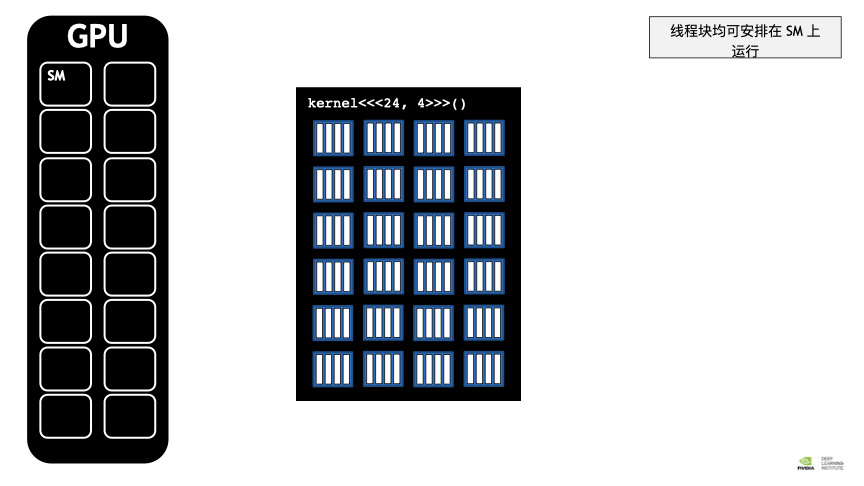
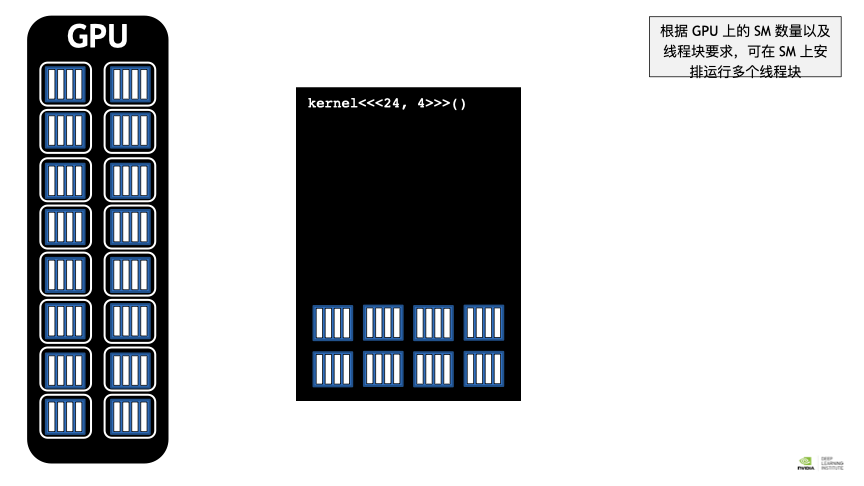
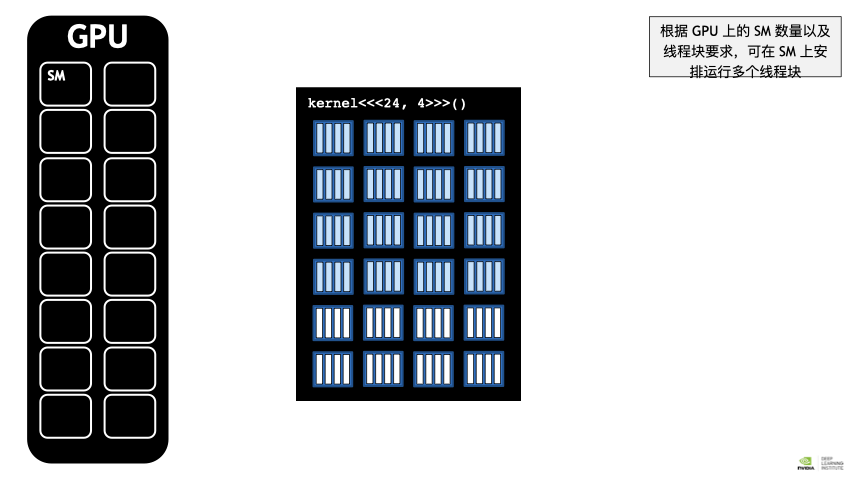
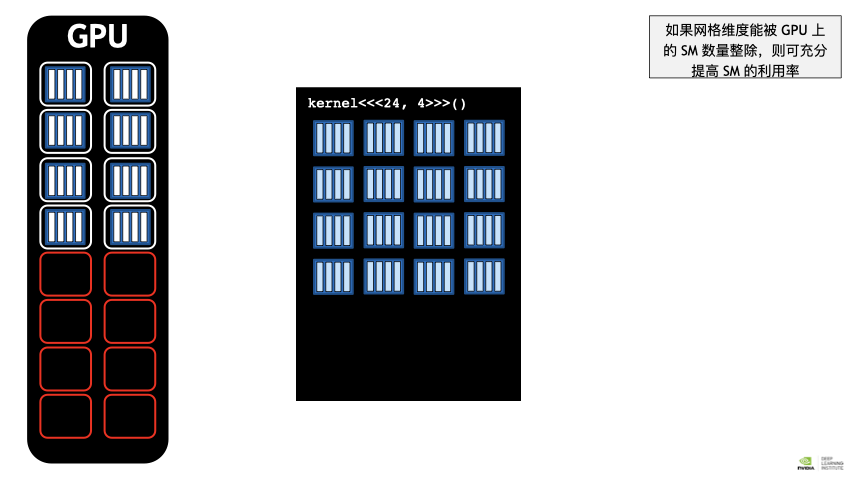
一个SM不仅仅执行一个block,但是一个block中的thread一定在同一个SM中。
如何能让SM中驻留更多的活跃的block也是cuda程序优化的目标之一。
为什么需要分block和thread层级
和GPU的architecture有关。
- 避免产生全局的同步等待
- 避免产生全局的数据共享(因为可能并没有必要)
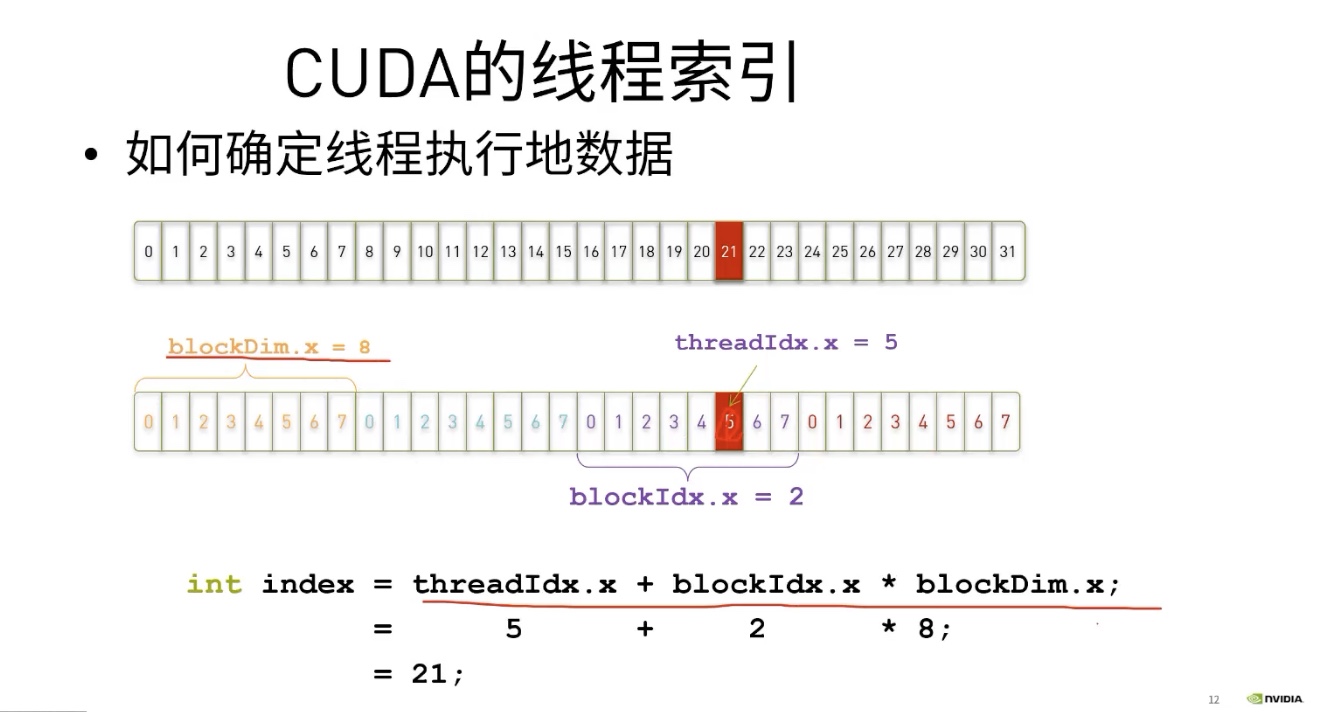
如何确定线程执行的数据
单个方向上的例子:
线程块包含的线程具有数量限制:确切地说是 1024 个。为增加加速应用程序中的并行量,我们必须要能在多个线程块之间进行协调。
CUDA 核函数可以访问给出块中线程数的特殊变量:blockDim.x。通过将此变量与 blockIdx.x 和 threadIdx.x 变量结合使用,并借助惯用表达式 threadIdx.x + blockIdx.x * blockDim.x 在包含多个线程的多个线程块之间组织并行执行,并行性将得以提升。以下是详细示例。
执行配置 <<<10, 10>>> 将启动共计拥有 100 个线程的网格,这些线程均包含在由 10 个线程组成的 10 个线程块中。因此,我们希望每个线程(0 至 99 之间)都能计算该线程的某个唯一索引。
- 如果线程块
blockIdx.x等于0,则blockIdx.x * blockDim.x为0。向0添加可能的threadIdx.x值(0至9),之后便可在包含 100 个线程的网格内生成索引0至9。 - 如果线程块
blockIdx.x等于1,则blockIdx.x * blockDim.x为10。向10添加可能的threadIdx.x值(0至9),之后便可在包含 100 个线程的网格内生成索引10至19。 - 如果线程块
blockIdx.x等于5,则blockIdx.x * blockDim.x为50。向50添加可能的threadIdx.x值(0至9),之后便可在包含 100 个线程的网格内生成索引50至59。 - 如果线程块
blockIdx.x等于9,则blockIdx.x * blockDim.x为90。向90添加可能的threadIdx.x值(0至9),之后便可在包含 100 个线程的网格内生成索引90至99。
提问:如果执行配置是多维(2dim, 3dim)的情形下,该如何计算索引呢?
CUDA可以将网格和线程块定义为最多具有 3 个维度的变量。使用多个维度定义网格和线程块绝不会对其性能造成任何影响,但这在处理具有多个维度的数据时可能非常有用,例如 2D 矩阵。如要定义二维或三维网格或线程块,可以使用 CUDA 的 dim3 类型。
dim3 threads_per_block(16, 16, 1);
dim3 number_of_blocks(16, 16, 1);
someKernel<<<number_of_blocks, threads_per_block>>>();
例子:使用2D的执行配置实现矩阵乘法运算的加速
#include <stdio.h>
#define N 64
__global__ void matrixMulGPU( int * a, int * b, int * c )
{
int row = blockIdx.x * blockDim.x + threadIdx.x;
int col = blockIdx.y * blockDim.y + threadIdx.y;
int val = 0;
if (row < N && col < N)
{
for ( int k = 0; k < N; ++k )
val += a[row * N + k] * b[k * N + col];
c[row * N + col] = val;
}
}
/*
* This CPU function already works, and will run to create a solution matrix
* against which to verify your work building out the matrixMulGPU kernel.
*/
void matrixMulCPU( int * a, int * b, int * c )
{
int val = 0;
for( int row = 0; row < N; ++row )
for( int col = 0; col < N; ++col )
{
val = 0;
for ( int k = 0; k < N; ++k )
val += a[row * N + k] * b[k * N + col];
c[row * N + col] = val;
}
}
int main()
{
int *a, *b, *c_cpu, *c_gpu; // Allocate a solution matrix for both the CPU and the GPU operations
int size = N * N * sizeof (int); // Number of bytes of an N x N matrix
// Allocate memory
cudaMallocManaged (&a, size);
cudaMallocManaged (&b, size);
cudaMallocManaged (&c_cpu, size);
cudaMallocManaged (&c_gpu, size);
// Initialize memory; create 2D matrices
for( int row = 0; row < N; ++row )
for( int col = 0; col < N; ++col )
{
a[row*N + col] = row;
b[row*N + col] = col+2;
c_cpu[row*N + col] = 0;
c_gpu[row*N + col] = 0;
}
/*
* Assign `threads_per_block` and `number_of_blocks` 2D values
* that can be used in matrixMulGPU above.
*/
dim3 threads_per_block = dim3(8, 8);
dim3 number_of_blocks = dim3((N / threads_per_block.x) + 1, (N / threads_per_block.y) + 1);
matrixMulGPU <<< number_of_blocks, threads_per_block >>> ( a, b, c_gpu );
cudaDeviceSynchronize();
// Call the CPU version to check our work
matrixMulCPU( a, b, c_cpu );
// Compare the two answers to make sure they are equal
bool error = false;
for( int row = 0; row < N && !error; ++row )
for( int col = 0; col < N && !error; ++col )
if (c_cpu[row * N + col] != c_gpu[row * N + col])
{
printf("FOUND ERROR at c[%d][%d]\n", row, col);
error = true;
break;
}
if (!error)
printf("Success!\n");
// Free all our allocated memory
cudaFree(a); cudaFree(b);
cudaFree( c_cpu ); cudaFree( c_gpu );
}
CUDA的内存分配
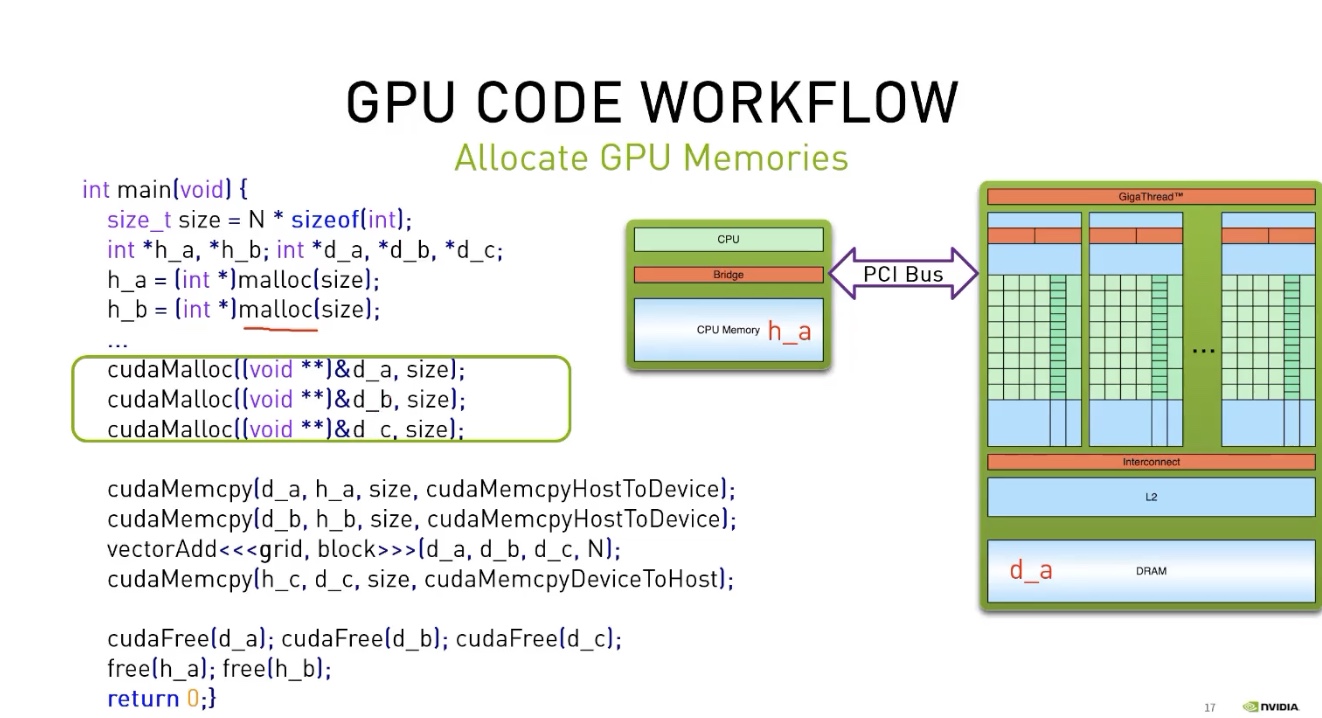
int N = 100;
size_t size = N * sizeof(int);
int *h_a;
int *d_a;
cudaMalloc((void **)&d_a, size);
cudaMemcpy(d_a, h_a, size, cudaMemcpyHostToDevice);
提问,为什么cudaMalloc传入的参数类型需要为(void **)?
答:C的编程范式,就和修改 变量值 需要传入 指针 一个道理。
现在我们要修改指针d_a的值(将它修改为GPU上申请到的显存的首地址),
因此需要传入d_a的指针。
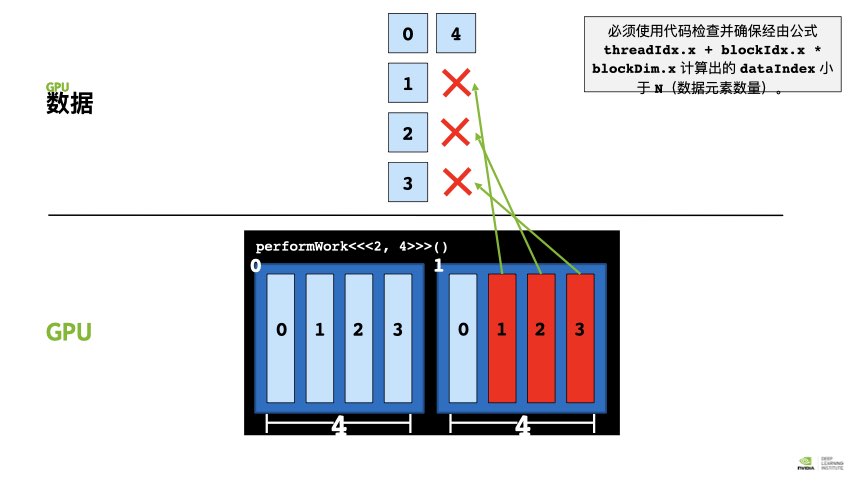
如果线程数量超过任务的数量怎么办?
多出来的线程访问不存在的元素会导致运行时错误/或者不会报错,但是由于数组访问已经越界,可能会造成后续的内存错误。所以必须在代码中检查
threadIdx.x + blockIdx.x * blockDim.x的index的值是小于数组中的元素的。
如何合理设置grid_size和block_size?
没有一个标准答案
block_size = 128;
grid_size = (N + block_size - 1) / block_size;
每个block可以申请多少线程
每个block的总线程数量,上限为1024。在cuda的例子中可以看到:
Maximum numner of threads per block: 1024
换言之,block的dimension的size(x, y, z)虽然最大的dim各为(1024, 1024, 64)但是x,y,z的乘积不能超过1024。
每个block应该申请多少线程
因为最小的线程数量调度的单位是一个warp也就是32个。因此一个block中的线程个数,尽量为32的倍数。
如果数据过大,线程不够用怎么办
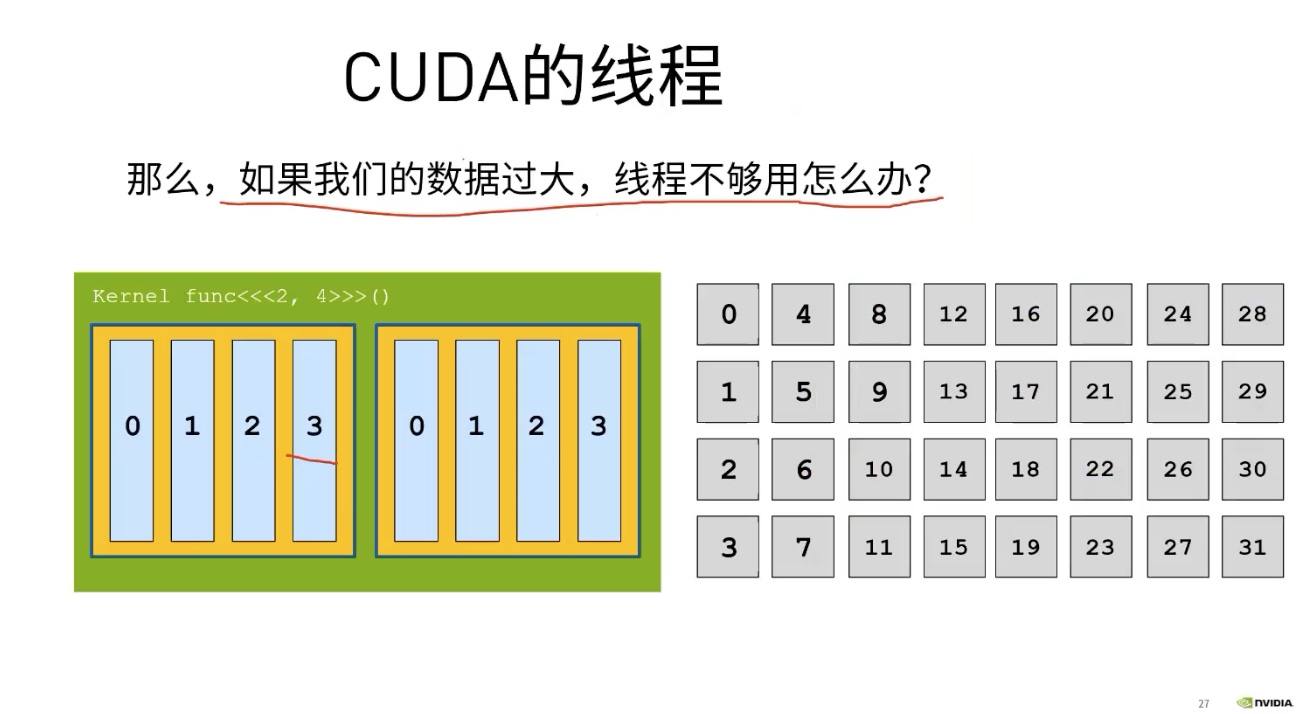
例如我只能有8个thread,却要处理长度为32的数组。答案是:网格跨度循环。
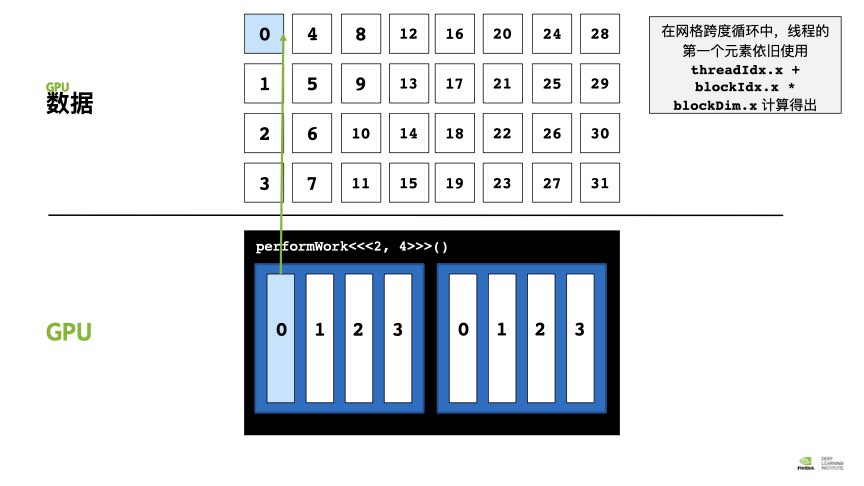
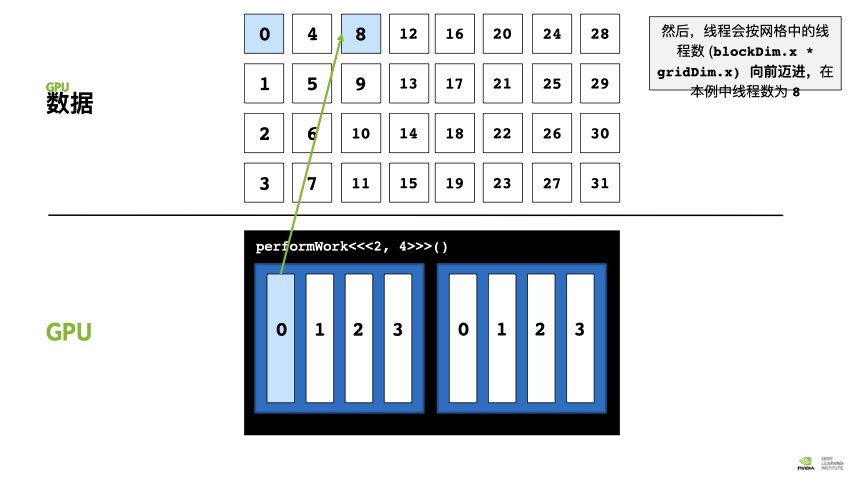
方法:在核函数里面加一个loop, CUDA 提供一个可给出网格中线程块数的特殊变量:gridDim.x. 在每个线程里面,要依靠 gridDim.x * blockDim.x作为循环的步进大小,
代码示例:
__global__ void add(const double *x, const double *y, const double *z, int n)
{
int index = blockDim.x * blockIdx.x + threadIdx.x;
int stride = blockDim.x * gridDim.x;
for(; index < n; index += stride)
{
z[index] = x[index] + y[index];
}
}
代码练习
1. blockIdx和threadIdx
index_of_thread.cu:
#include <stdio.h>
__global__ void hello_from_gpu()
{
const int bid = blockIdx.x;
const int tid = theadIdx.x;
printf("Hello from block %d and thread %d !/n", bid, tid);
}
int main()
{
int grid_size = 5;
int block_size = 65;
hello_from_gpu<<<grid_size, block_size>>>();
cudaDeviceSynchronize();
return 0;
}
通过不同的grid_size和block_size的调整,可观察到:
- 硬件层面是以warp为单位来对线程进行调用的。
- warp中的线程虽说硬件层面是同时执行,但是0-31号线程的顺序是递增的。这是因为printf的关系。
- block的执行顺序是无固定循序的,因此blockIdx打印的顺序无规律。
2. 两向量相加
vec_add.cu
void __global__ add(const double *x, const double *y, double *z, int count)
{
const int n = blockDim.x * blockIdx.x + threadIdx.x;
if( n < count)
{
z[n] = x[n] + y[n];
}
}
int main(void)
{
// 申请内存
const int N = 1000;
const int M = sizeof(double) * N;
double *h_x = (double*) malloc(M);
double *h_y = (double*) malloc(M);
double *h_z = (double*) malloc(M);
// 初始化
for (int n = 0; n < N; ++n)
{
h_x[n] = 1;
h_y[n] = 2;
}
// 申请显存
double *d_x, *d_y, *d_z;
cudaMalloc((void **)&d_x, M);
cudaMalloc((void **)&d_y, M);
cudaMalloc((void **)&d_z, M);
// 拷贝数据到device
cudaMemcpy(d_x, h_x, M, cudaMemcpyHostToDevice);
cudaMemcpy(d_y, h_y, M, cudaMemcpyHostToDevice);
// 执行kernel function
const int block_size = 128;
const int grid_size = (N + block_size - 1) / block_size;
add<<<grid_size, block_size>>>(d_x, d_y, d_z, N);
// 拷贝结果回Host
cudaMemcpy(h_z, d_z, M, cudaMemcpyDeviceToHost);
// 释放显存和内存
free(h_x);
free(h_y);
free(h_z);
cudaFree(d_x);
cudaFree(d_y);
cudaFree(d_z);
return 0;
}
问题: 如果调用cudaFree()之前,进程意外中断退出,显存会被释放吗?
进阶版两向量相加:
#include <stdio.h>
#include <assert.h>
inline cudaError_t checkCuda(cudaError_t result)
{
if (result != cudaSuccess) {
fprintf(stderr, "CUDA Runtime Error: %s\n", cudaGetErrorString(result));
assert(result == cudaSuccess);
}
return result;
}
__global__ void initWith(float num, float *a, int N)
{
int index = blockDim.x * blockIdx.x + threadIdx.x;
int stride = gridDim.x * blockDim.x;
for(; index < N; index += stride)
{
a[index] = num;
}
}
__global__ void addVectorsInto(float *result, float *a, float *b, int N)
{
int index = blockDim.x * blockIdx.x + threadIdx.x;
int stride = gridDim.x * blockDim.x;
for(; index < N; index += stride)
{
result[index] = a[index] + b[index];
}
}
void checkElementsAre(float target, float *array, int N)
{
for(int i = 0; i < N; i++)
{
if(array[i] != target)
{
printf("FAIL: array[%d] - %0.0f does not equal %0.0f\n", i, array[i], target);
exit(1);
}
}
printf("SUCCESS! All values added correctly.\n");
}
int main()
{
const int N = 2<<20;
size_t size = N * sizeof(float);
float *a;
float *b;
float *c;
checkCuda(cudaMallocManaged(&a, size));
checkCuda(cudaMallocManaged(&b, size));
checkCuda(cudaMallocManaged(&c, size));
int blocks_num = 32;
int threads_per_block = 1024;
initWith<<<blocks_num, threads_per_block>>>(3, a, N);
initWith<<<blocks_num, threads_per_block>>>(4, b, N);
initWith<<<blocks_num, threads_per_block>>>(0, c, N);
checkCuda(cudaGetLastError());
addVectorsInto<<<blocks_num, threads_per_block>>>(c, a, b, N);
checkCuda(cudaGetLastError());
checkCuda(cudaDeviceSynchronize());
checkElementsAre(7, c, N);
cudaFree(a);
cudaFree(b);
cudaFree(c);
}
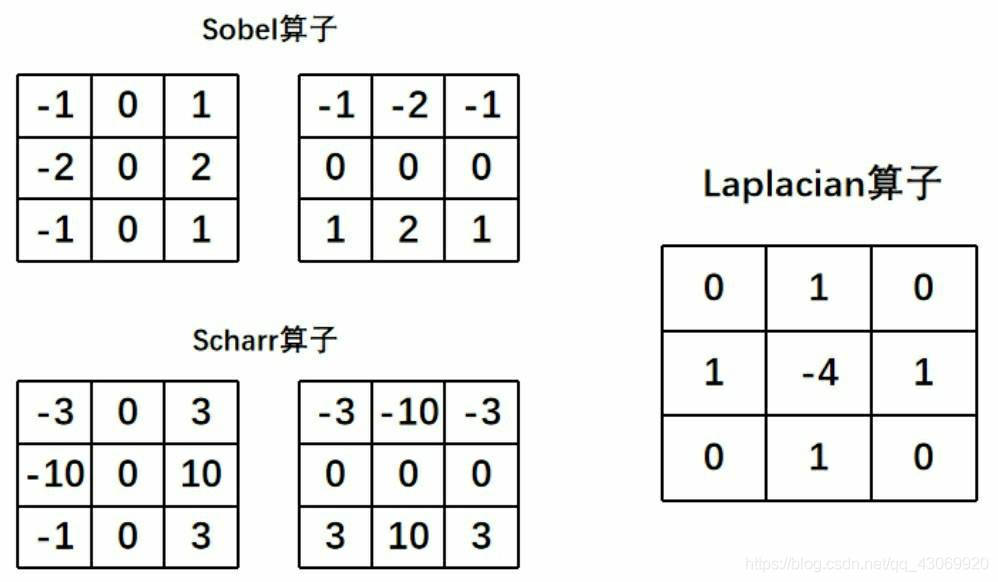
3. Sobel边缘检测
//GPU实现Sobel边缘检测
// x0 x1 x2
// x3 x4 x5
// x6 x7 x8
__global__ void sobel_gpu(unsigned char* in, unsigned char* out, int imgHeight, int imgWidth)
{
int x = threadIdx.x + blockDim.x * blockIdx.x;
int y = threadIdx.y + blockDim.y * blockIdx.y;
int index = y * imgWidth + x;
int Gx = 0;
int Gy = 0;
unsigned char x0, x1, x2, x3, x4, x5, x6, x7, x8;
if (x > 0 && x < imgWidth && y>0 && y < imgHeight)
{
x0 = in[(y - 1) * imgWidth + x - 1];
x1 = in[(y - 1) * imgWidth + x ];
x2 = in[(y - 1) * imgWidth + x + 1];
x3 = in[(y) * imgWidth + x - 1];
x4 = in[(y ) * imgWidth + x ];
x5 = in[(y ) * imgWidth + x + 1];
x6 = in[(y + 1) * imgWidth + x - 1];
x7 = in[(y + 1) * imgWidth + x ];
x8 = in[(y + 1) * imgWidth + x + 1];
Gx = (x0 + x3 * 2 + x6) - (x2 + x5 * 2 + x8);
Gy = (x0 + x1 * 2 + x2) - (x6 + x7 * 2 + x8);
out[index] = (abs(Gx) + abs(Gy)) / 2;
}
}
int main()
{
//利用opencv的接口读取图片
Mat img = imread("1.jpg", 0);
int imgWidth = img.cols;
int imgHeight = img.rows;
//利用opencv的接口对读入的grayImg进行去噪
Mat gaussImg;
GaussianBlur(img, gaussImg, Size(3, 3), 0, 0, BORDER_DEFAULT);
// GPU结果为dst_gpu
Mat dst_gpu(imgHeight, imgWidth, CV_8UC1, Scalar(0));
//申请指针并将它指向GPU空间
size_t num = imgHeight * imgWidth * sizeof(unsigned char);
unsigned char* in_gpu;
unsigned char* out_gpu;
cudaMalloc((void**)&in_gpu, num);
cudaMalloc((void**)&out_gpu, num);
//定义grid和block的维度(形状)
dim3 threadsPerBlock(32, 32);
dim3 blocksPerGrid((imgWidth + threadsPerBlock.x - 1) / threadsPerBlock.x,
(imgHeight + threadsPerBlock.y - 1) / threadsPerBlock.y);
//将数据从CPU传输到GPU
cudaMemcpy(in_gpu, img.data, num, cudaMemcpyHostToDevice);
//调用在GPU上运行的核函数
sobel_gpu<<<blocksPerGrid,threadsPerBlock>>>(in_gpu, out_gpu, imgHeight, imgWidth);
//将计算结果传回CPU内存
cudaMemcpy(dst_gpu.data, out_gpu, num, cudaMemcpyDeviceToHost);
//释放GPU内存空间
cudaFree(in_gpu);
cudaFree(out_gpu);
return 0;
}
注意例子中的图像大小为512 * 512 而我们申请的每个block的线程数量,是32 * 32是符合小于1024个线程的约束的。
课后疑难小结
-
device 返回类型可以不是void?
可以,但是该种情况下,执行效果需要通过其他方式返回。”执行效果”指的是什么?
-
如何更好理解SM?
可以将GPU的一个SM类比为CPU的一个物理核心。
-
CUDA程序最大申请的线程数量?
\[1024 * (2^{31} - 1) * 65535 * 65535\] -
申请的threads超出规模回怎么样?
会报告”无效启动配置”
-
Grid的数量和SM的数量有什么关联吗?
wait for answering -
一个kernel function调用的调用对应一个Grid这个说法正确吗?
wait for answering -
如果调用
cuda_Free()之前,进程意外中断退出,显存会被释放吗?会释放。